Vrep’te Yol Planlaması
Path Planning
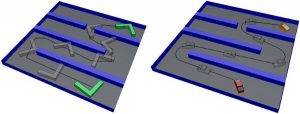
V-Rep’in yol planlama modülü, 3D alanda yol planlama görevlerini ve 2D alanı için holonomik olmayan hareket kısıtlamaları olan araçları halledilmesini sağlar. Yol planlama modülü, hareket planlama modülü (motion planning module)tarafından işlenen kinematik zincirlerin hareket planlamasını içermez.Aşağıdaki şekillerde V-Rep’teki bazı yol planlama örnekleri gösterilmektedir:
Yol planlama görevi genellikle birkaç giriş değeri veya parametre alır:
- -Bir başlangıç konumu(a start position) (veya yapılandırmayı başlatmak): bir cihazın (ör. Robot) ilk yapılandırmasıdır.
- -Bir hedef konum (veya hedef yapılandırması): cihaz veya robot için istenen yapılandırmadır.
- -Engeller: Bu, cihazın (veya robotun) çarpışmaması gereken nesnelerdir(objects), baştan hedefe yapılandırma yolunu izlerken.
Başlangıç yapılandırmasını hedef yapılandırmasına bağlayan bir yol, belirli bir sayıda boyuta sahip bir yapılandırma alanında (ör. X, Y yapılandırma alanı) belirlenebilir (veya sınırlı olabilir). Bundan başka, görevi daha karmaşık hale getiren (örneğin, engellere belirli bir mesafe eşiğini tutmak veya yalnızca bir yönde hareket ettirmek) ek kısıtlamalara ihtiyaç vardır.