Sistem Programlama – Seri porttan bilgisayara text gönderme ve okuma
ÖNEMLİ: Proje Dosyası Güncellemesi
07.03.2016 tarihinde hazır proje dosyalarında
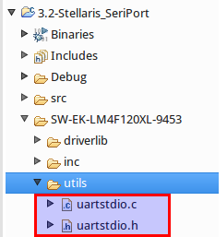
Son güncellemeyle proje klasörü altında utils/uartstdio.c ve utils/uartstdio.h dosyaları eklenmiştir.
Eğer projenizde bu dosyalar bulunmuyorsa, hazır proje dosyalarının yeni versiyonunu Stellaris LauchPad veya Tiva C LaunchPad için indirebilirsiniz.
Güncelleme için:
yeni indirdiğiniz dosya ile yeni proje açabilirsiniz
veya hazır projeye sadece utils klasörünü yukarıdaki resimdeki gibi ekleyebilirsiniz
ÖNEMLİ: Proje Ayarları Güncellemesi
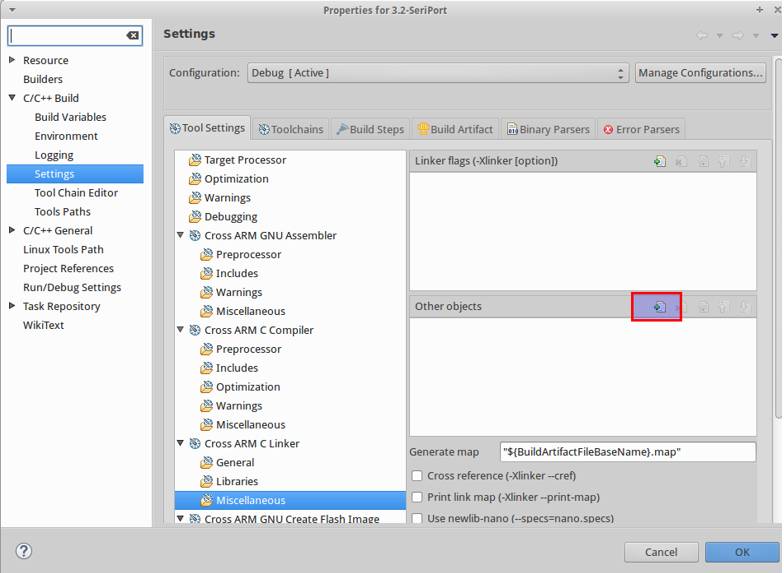
Proje isminde sağa tıklayarak açılan bölümde “Properties” e tıklayınız.
Açılan menüden C/C++ Build → Settings menüsünü açınız. Aşağıdaki şekildeki gibi “Cross ARM C Linker” altından “Miscellaneous”’u açınız. “Other objects” kısmındaki ekleme buttonuna tıklayınız.
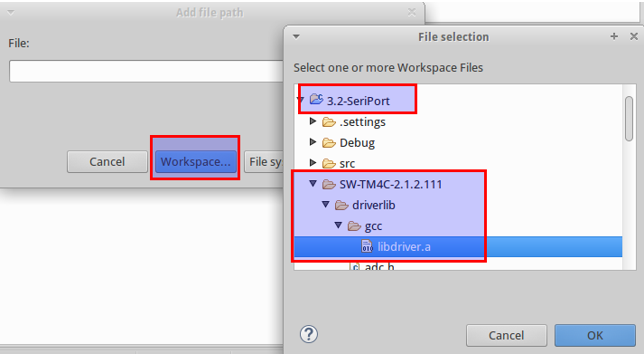
Açılan pencereden “Workspace” buttonuna tıklayıp, aşağıdaki resimdeki gibi açık olan projeniz altından “…driverlib/gcc/libdriver.a” dosyasını bulup ekleyiniz.
Seri porttan bilgisayara text gönderme ve okuma
Seri portu şimdilik log atmak için kullanacağımız için fazla detaya girmiyoruz. Aşağıdaki kod ile bilgisayara yazı gönderebilirsiniz.
#include ;
#include "inc/tm4c123gh6pm.h"
// stellaris #include "inc/lm4f120h5qr.h"
#include ;
#include "inc/hw_types.h"
#include "driverlib/gpio.h"
#include "driverlib/sysctl.h"
#include "driverlib/uart.h"
#include "utils/uartstdio.h"
// secenekler: 300, 600, 1200, 2400, 4800, 9600, 19200, 38400, 57600, 115200
#define BAUDRATE 600
/** UART (seri port) ayarini yapan fonksiyon */
void init_UARTstdio() {
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA);
GPIOPinConfigure(0x00000001);
GPIOPinConfigure(0x00000401);
GPIOPinTypeUART(0x40004000, 0x00000001 | 0x00000002);
UARTConfigSetExpClk(0x40004000, SysCtlClockGet(), BAUDRATE,
(UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_ONE |
UART_CONFIG_PAR_NONE));
UARTStdioConfig(0, BAUDRATE, SysCtlClockGet());
}
int main(void) {
int i;
init_UARTstdio();
for (i = 0 ; ; i++) {
UARTprintf("test: %d\n", i);
}
} “Undefined reference to …” hatasının alınması =
“ÖNEMLİ: Proje Dosyası Güncellemesi” veya “ÖNEMLİ: Proje Ayarları Güncellemesi” başlığındaki işlemlerde hata yapılmış olabilir.
Sanal makineden seri porta erişmek için aşağıdaki işlemleri yapabilirsiniz:
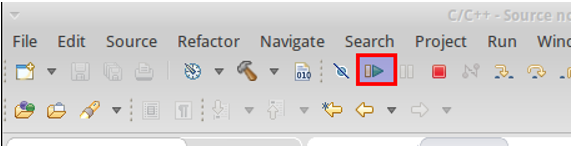
Önceki başlıktaki kodları derleyip, kartta çalıştırınız.
“Serial port terminal” programını açınız

Configuration menüsünden Port seçeneğini açınız
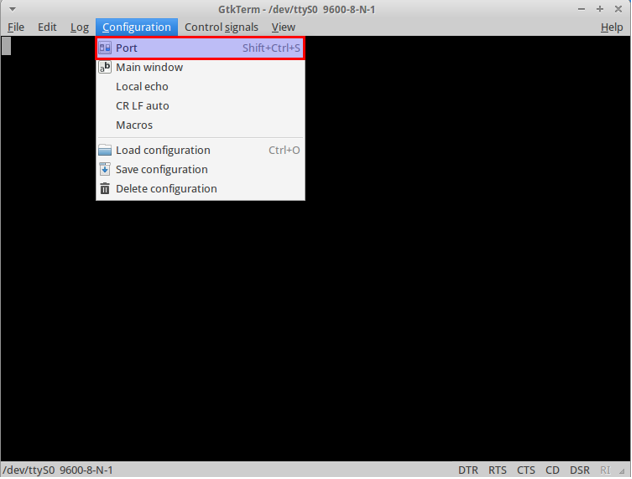
Ayarları aşağıdaki gibi yapınız.
UYARI: Baud Rate kısmına kodun içindeki “#define BAUDRATE 600” satırındaki değeri (600) girin.
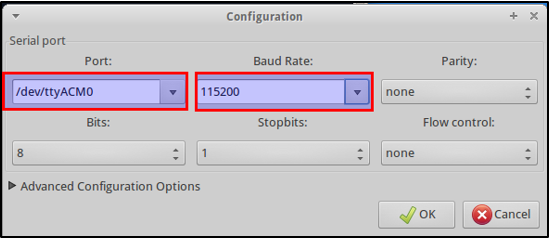
Port kısmında seçeneklerde /dev/ttyACM1 gibi görünebilir. /dev/ttyACM ile başlayan portu seçin.
Karttaki program çalışır durumdaysa Serial port terminal ekranında
deneme: 12345
deneme: 12346
…
gibi satırlar göreceksiniz.
Eğer ekranda tuhaf yazılar görüyorsanız, birkaç kere programı duraklatıp, devam ettirmeyi deneyiniz

Tuhaf yazılar duraklatmayla çözülmüyorsa, Serial port terminali durdurup, tekrar çalıştırınız. Çalıştırıken Baud Rate değerinin koddaki ile aynı olduğunu kontrol ediniz.