ROS Kinetic Kurulumu
Önemli Not: Ros Kinetic sürümü için bilgisayarınızda Ubuntu 16.04 LTS yüklü olması gerekmektedir. Ubuntu 18 LTS yüklemeniz durumunda Ros Kinetic kurulumu yapmanız tavsiye edilmemektedir.
Bu dokümanda ROS Kinetic kurulumu, bağımlı paketlerin yüklenmesi, catkin çalışma ortamının oluşturulması Turtlebot3 kurulumu ve catkin paketi oluşturma işlemleri anlatılacaktır. Turtlebot 3 robot programlanması için ROS Kinetic dağıtımı yüklenmesi gerekmektedir.
ROS Kinetic Kurulumu
Öncelikle aşağıdaki komutlar terminalde çalıştırılır ve ROS Kinetic kurulumunu tamamlanır.
sudo apt-get update sudo apt-get upgrade wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_kinetic.sh && chmod 755 ./install_ros_kinetic.sh && bash ./install_ros_kinetic.sh
wget --no-check-certificate https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_kinetic.sh && chmod 755 ./install_ros_kinetic.sh && bash ./install_ros_kinetic.sh
ROS kurulumundan sonra bilgisayar yeniden başlatılmalıdır. |
Bağımlı Paketlerin Yüklenmesi
Aşağıdaki komut çalıştırılır ve resimlerde de görüldüğü gibi bağımlı paketlerin yüklenmesi işlemi de sorunsuz bir şekilde tamamlanmış olur.
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation ros-kinetic-interactive-markers
mkdir -p catkin_ws/src cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone https://github.com/ROBOTIS-GIT/turtlebot3.git cd ~/catkin_ws && catkin_make
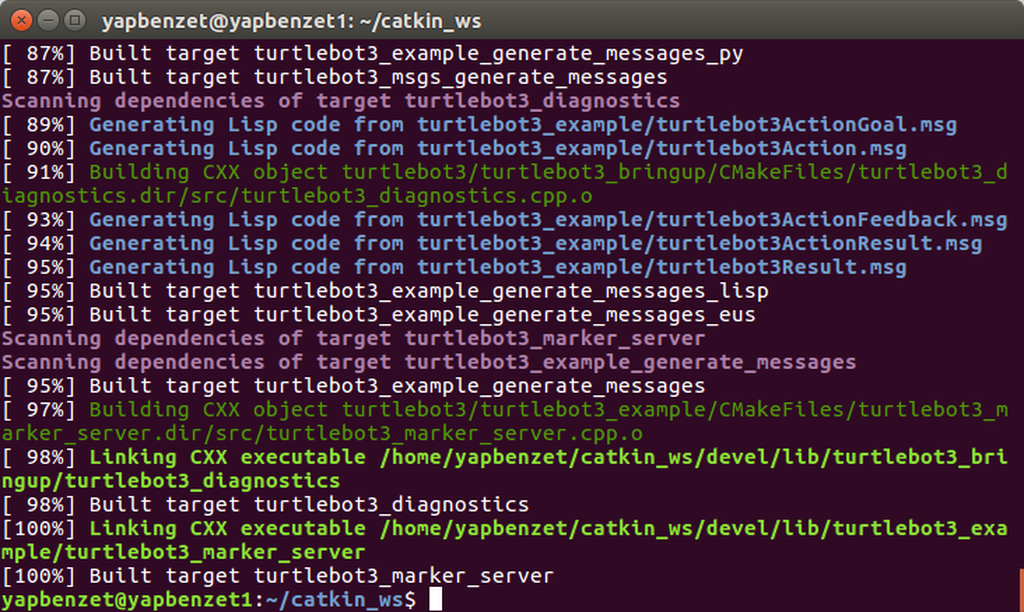
catkin_make komutu herhangi bir hata almadan tamamlandıysa Turtlebot3 kurulumu başarıyla tamamlanmış demektir. |
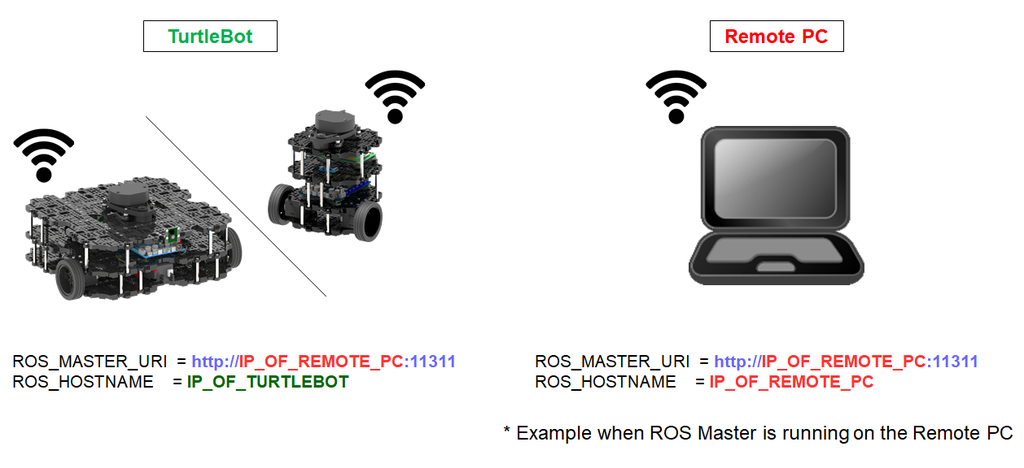
Network Konfigürasyonu
Terminal ekranına aşağıdaki komutu girerek IP adresi öğrenilir
ifconfig
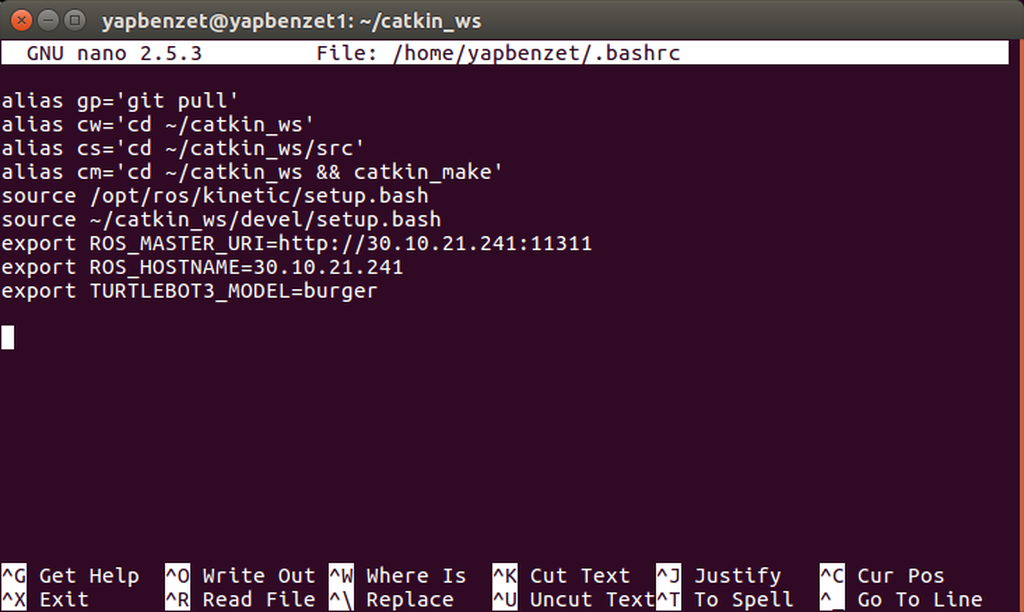
Daha sonra herhangi bir metin editörü ile bashrc dosyasını düzenlemek için açılır.
$ nano ~/.bashrc
Resimlerde de gözüktüğü gibi dosyanın sonundaki ilgili bölümleri üzerinde çalışılan bilgisayarın IP adresi ile değiştirilir. (roscore çalıştıracağımız bilgisayarda Hostname ve Master name aynı olmalı, diğer bilgisayarda Master bölümüne roscore’u çalıştırdığımız bilgisayarın IP adresini vereceğiz) Ve daha sonra aşağıda bulunan komutla işlemi tamamlıyoruz.
source ~/.bashrc