ROS Catkin paketi oluşturma
ROS Catkin paketi oluşturma
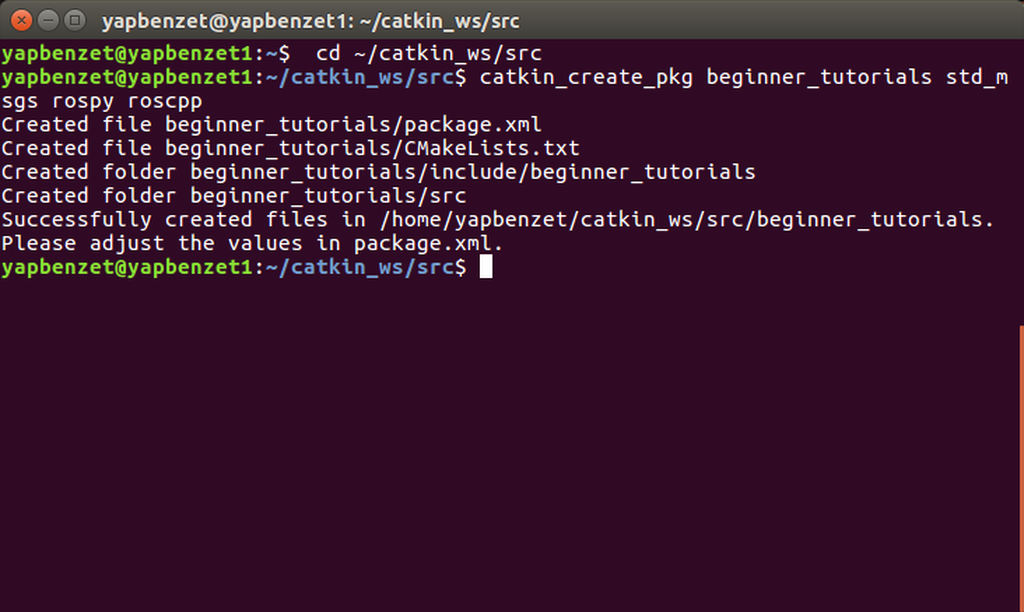
Aşağıdaki kodu terminal ekranına girerek, daha önce oluşturulan catkin_ws/src lokasyonuna gidilir.
cd ~/catkin_ws/src
catkin_create_pkg komutuyla istediğimiz isimde (bizim örneğimizde beginner_tutorials) ve std_msgs, (mesajlaşma uygulamalarında gerekli kütüphane) rospy (rospython) ve roscpp (rosc++) bağımlılıklarını da ekleyerek bir catkin paketi oluşturulur.
catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
Çalışma alanını ROS ortamına eklemek için oluşturulan kurulum dosyası kaydedilmeli. Aşağıdaki komutla bu işlem gerçekleştirilir.
source ~/catkin_ws/devel/setup.bash