Robotlar için Lineer Cebir
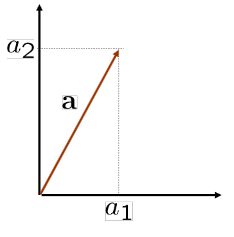
VECTORS (VEKTÖRLER)
Yönü ve büyüklüğü olan doğru parçası
Sayılar dizisi
n boyutlu uzaylarda bir noktayı temsil ederler.
x=[1 2 3 4]; y=[5 6 7 8];
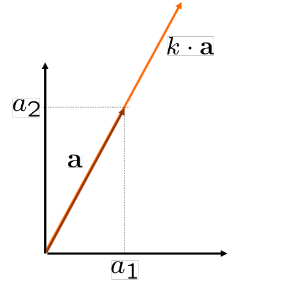
Scalar Product (Skaler Çarpım)
Skaler-vektör çarpım; “k.a”
Vektörün sadece uzunluğunu değiştirir,yönünü değil
>> x=[1 2 3 4];
>> k=2;
>> k*x2468Sum (Toplam)
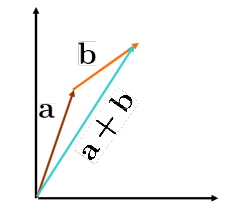
Vektörlerde toplama işlemi;
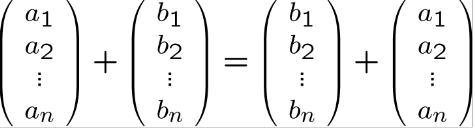
Bunu zincirleme veya ucuca ekleme olarak görselleştirebiliriz.
>> x=[4 5 2];
>> y=[1 2 6];
>> x+y
ans =
5 7 8Dot Product (Nokta Çarpım)
Vektörlerde iç çarpım (inner product);

x=[4 5 2];
y=[1 2 6];
dot(x,y)
ans =
26V iç çarpım ve x, y ?V olsun. Eğer = 0 ise x ve y ye ortogonal (dik) vektörler denir.
İki vektör arasındaki açı, ifadesinde cos ? = 0 ise x , y ortogonal vektörler, cos ? = ± 1 yani = ± || x|| || y|| ise x ve y vektörleri paralel vektörlerdir.
>> y=[1 2 6];
>> norm(y)
ans =
6.4031Linear (In)Dependence (Lineer Bağımlılık)
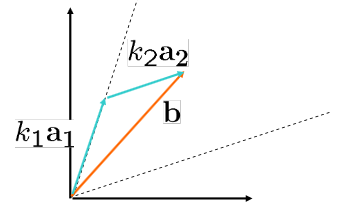
b lineer doğrusal vektör olarak tanımlansın;

Başka bir deyişle, b vektörü ailerin k skaleriyle çarpımlarının toplamları şeklinde ifade edilebilir.
Eğer ki ler yoksa b , ai ye lineer bağımlı değildir.
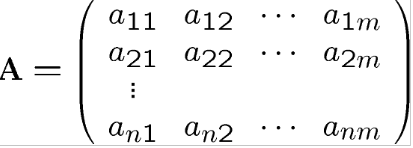
MATRICES (MATRİSLER)
Matrisler değer tablosu olarak yazılırlar, birçok kullanım şekilleri vardır.
>> A=[1 2 3;4 5 6;7 8 9]
A =
1 2 3
4 5 6
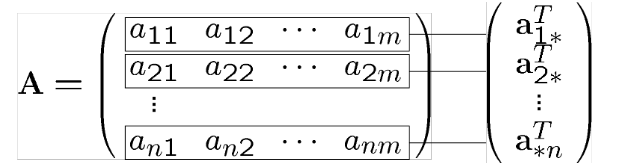
7 8 9Matrices as Collections of Vectors
Kolon Vektörleri (Column Vektors)
Satır Vektörleri (Row Vectors)
Matrices Operations ( Matris İşlemleri)
Sum (commutative, associative)
Product (not commutative)
Inversion (square, full rank)
Transposition
Multiplication by a scalar
Multiplication by a vector
Matrix Vector Product (Matris Vektör Çarpım)
Nokta çarpımında A.b nin bileşeni “i” olmak üzere ;
A.b vektörü bi katsayıları ile a*iye lineer bağımlıdır.
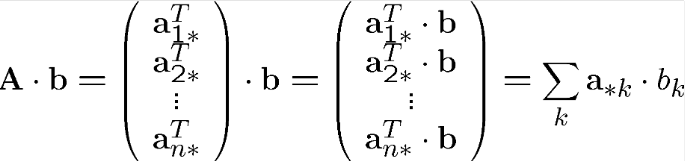
Eğer kolon vektörleri referans sistemi temsil ediyorsa, A.b çarpımı b vektörünün a*i ye göre küresel dönüşümünü hesaplar.
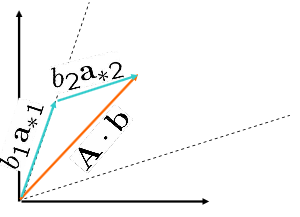
Her ai,j doğrusal bir karıştırma katsayısı olarak görülebilir, bu (A.b)j ye nasıl katkıda bulunduğunu gösterir.
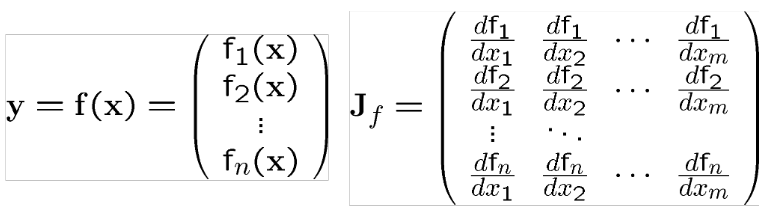
Örneğin; çok boyutlu fonksiyonların Jakobiyenti
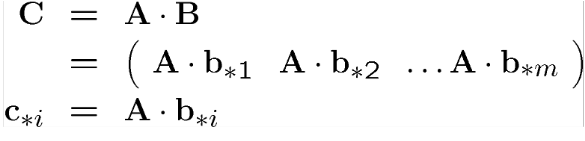
Matrix Matrix Product (Matris-Matris Çarpım)
Şu şekillerde tanımlanabilir;
Satır ve sütun vektörlerinin noktasal çarpımı
A ve B sütun vektörlerinin skalerleri ile lineer kombinasyonu
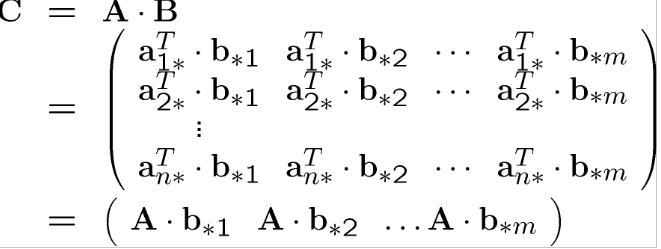
İkinci yorumu incelediğimizde C sütunlarının B sütunlarından A ya kadar izdüşümleri olduğunu görürüz.
Matrisler için yapılan tüm yorumlar vektör çarpımına dayanır.
>> A=[2 4 3;2 1 1 ;4 6 5];
>> B=[2 1 5;-3 -2 1;0 4 -2];
>> A*B
ans =
-8 6 8
1 4 9
-10 12 16Linear Systems (Lineer Sistemler)
b Ax dönüşümünün bir sonucu iken x koordinatları A referans sisteminde bulunur.
Birçok çözüm yöntemi bulunur.
Sistem alttan veya üstten sınırlandırılmalıdır.
Bir (A’ b’) matrisini göz önüne alarak ve lineer olarak bağımlı tüm satırları bastırarak azaltılmış bir (A b) sistemini elde edebilirsiniz.
A’ nın lineer bağımsız sütunlarının veya satırlarının sayısı b’ nin boyutundan büyükse sistem üstten sınırlıdır.
Üstten sınırlı bir sistemde çözüm bulunamaz ancak pseudo inversion çözümü bulunabilir.

A’ nın lineer bağımsız sütünlarının veya satırlarının sayısı b’ nin boyutundan küçükse sistem alttan sınırlıdır.
Alttan sınırlı sistemler sınırsız çözüm kabul eder.Sonsuzluğun derecesi rank(A’)-dim(b’)
Bir matrisin rankı lineer bağımsız satır veya sütunların maksimumudur.
Matrix Inversion (Ters Matris)

A full ranklı bir kare matris ise yukarıdaki denklemin geçerli olduğu şekilde tek bir B=A-1 matrisi vardır.
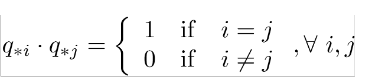
A nın i. satırı ve A-1 nın j. sütunları;
i=j ise ortogonal
diğer durumlarda skaler çarpım 1 dir.
A-1 in i. sütunu aşağıdaki sistemin çözümü ile bulunabilir;

>> A=[2 3;5 1];
>> rank(A)
ans =
2
>> B=inv(A)
B =
-0.0769 0.2308
0.3846 -0.1538
>> C=A*B
C =
1.0000 0
-0.0000 1.0000Trace (İz)
Sadece kare matrislerde tanımlıdır.
Köşegen elemanlarının toplamı ;

Aşağıdaki özelliklere sahip lineer bir operatördür;
Additivity:

Homogeneity:

Pairwise commutative:

Trace is similarity invariant:

Trace is transpose invariant
A=[2 -3 5;1 2 7;-1 0 1];
trace(A)ans =
5Rank
Lineer bağımsız satır veya sütunların maksimum sayısı.
f(x)=Ax dönüşüm görüntüsünün boyutu
A, mxn matrisi iken;
-rank(A)>=0 ve eşitlik sağlanır ancak ve ancak A sıfır matristir.
-rank(A)> a=[2 4 4;2 3 1;3 2 5]; >> rank(a) ans = 3
Determinant
Sadece kare matrislerde tanımlıdır.
Hatırlayın, det(A)=0 olmadığı durumlar için AxA-1=I idi.
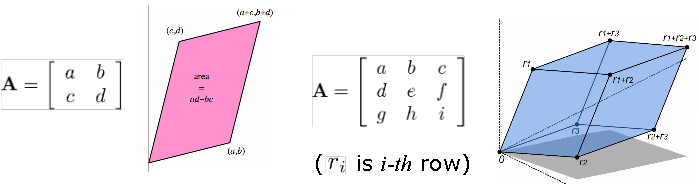
2×2 lik matris için A=[aij ] için;

3×3 lük matris için;

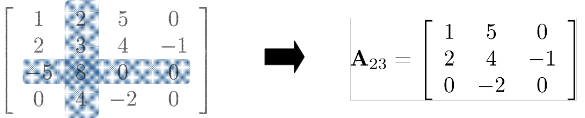
mxn genel matris için;
A matrisinin i. satır ve j. sütununa sahip Aij altmatrisini alalım.
3×3 lük matris için determinantı yeniden yazalım;

nxn lik matris için yazalım;

Cij=(-1)i+jdet(Aij) kofaktörünü (cofactor) alalım;
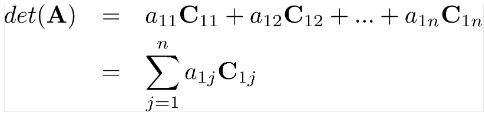
bu işleme ilk satır için kofaktör açılımı (cofactor expansion) denir.
>> A=[2 -3 5;1 2 7;-1 0 1];
>> det(A)
ans =
38problem: 25×25 lik bir matris alalım. Kofaktör açılımı n! tane çarpım gerektirir. n=25 için bu 1.5×1025 çarpımdır ve bunu modern bilgisayarlar 500.000 yılda alır .
Birçok hızlı metod vardır, Gauss elimination ile matrisi üçgensel hale indirgeyebiliriz.Buradan;
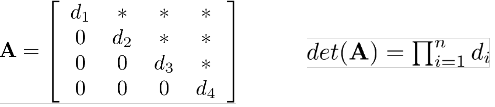
Çünkü üçgen matrisler için determinant, diyagonal elemanların çarpımıdır.
>> a=[2 4 4;2 3 1;3 2 5];
>> diag(a)
ans =
2
3
5Determinant Özellikleri;
Satır İşlemleri: (A nxn kare matris)
-Eğer B, A matrisinin iki satırının değiştirilmesinden oluşuyorsa det(B)=-det(A) dır.
-Eğer B, A matrisinin bir satırının c sabit sayısıyla çarpımından oluşuyorsa det(B)=c.det(A) dır.
-Eğer B, A matrisinin bir satırının diğer satırıyla toplamından veya çarpımından oluşuyorsa det(B)=det(A) dır.
Transpoz: det(A)=det(AT)
Çarpım: det(A.B)=det(A).det(B)
Determinant Uygulamaları;
Ters matris bulma: (A-1) ters matris , adj(A) adjugate (ek) matis olmak üzere) A-1=adj(A)/det(A)
Özdeğerler: Karakteristik polinom bulma, det(A- ? .I)=0
Alan ve Hacim: alan=det(A)
>> A=[1 2 3;2 4 -5;3 -5 6];
>> eig(A)
ans =
-3.0773
3.8414
10.2359Orthogonal Matrix (Ortogonal Matris)
Bir Q matrisi satır veya sütunlarının ortonormal bazı ile ifade edilebiliyorsa ortogonal matris dir.
Lineer dönüşüm olarak, norm korunur ve öklid uzayında bir izometri (isometry) görevi görür.(yansıma-reflection ve dönüşüm-rotation)
Bazı özellikler;
Q.QT=QT.Q=I
1=det(I)=det(QQT)=det(Q).det(QT)=det(Q)2
Rotational Matrix (Dönüşüm Matrisi)
Robotikte önemli;
2D rotasyon:

–3D rotasyon:

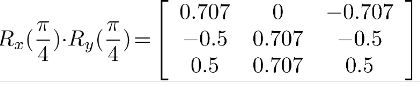
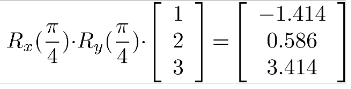

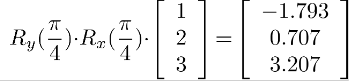
Rotasyon değişmeli değildir!
Matrices as Affine Transformations (Afin Dönüşümler Olarak Matrisler)
Bir 3D dönüşüm matrislerle kolay ve hızlı bir şekilde tanımlanabilir.
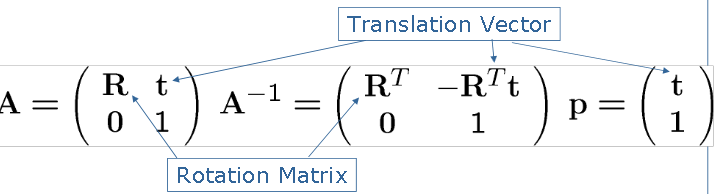
2D ve 3D de homojen davranım
Dönüşümlerin değişimli olmadığını doğal olarak hesaba katar.
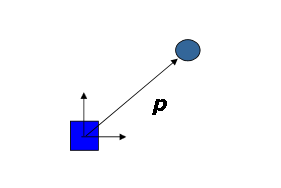
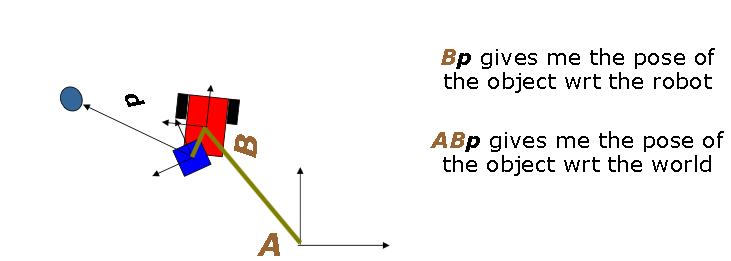
Combining Transformations (Dönüşümleri Birleştirme)
Basit bir yorum olarak; (homojen matrislerle ifade edilir) dönüşümlerin zincirlenmesi
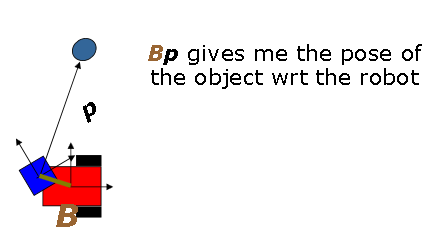
A matrisi robotun uzaydaki pozu,
B matrisi sensörün robot üzerindeki konumunu temsil etsin,
Sensör belirli bir p konumunda nesneyi kendi çerçevesinde algılar,(sensörün yeri hakkında ipucu yok)
Nesne küresel çerçevede nerededir?
Symmetric Matrix (Simetrik Matris)
A=AT ise A matrisi simetriktir.
A=-AT ise A matrisi simetrik değildir.
Her simetrik matris;
D=QAQT kosegenlestirilebilir, burada D ozdegelerin bir kosegen matrisidir ve Q, sutunlari A’nin ozvektorleri olan bir ortogonal matristir
Karesel formda tanımı;
>> A=[5 7 1;2 -8 -3;6 4 8;1 1 10];
>> A'
ans =
5 2 6 1
7 -8 4 1
1 -3 8 10Simetrik matris için;
>> A=[1 2 3;2 4 -5;3 -5 6]
A =
1 2 3
2 4 -5
3 -5 6
>> A'
ans =
1 2 3
2 4 -5
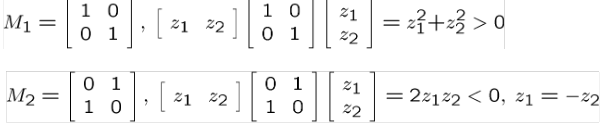
3 -5 6Positive Definite Matrix (Pozitif Tanımlı Matris)
Tanım:

örnek:
ÖZELLİKLERİ;
Tersi alınabilir.
Tüm özdeğerleri sıfırdan büyüktür.
İzi sıfırdan büyüktür.
A, A.AT , AT.A pozitif tanımlıdır.
Cholesky decomposition A=LLT
Jacobian Matrix (Jakobiyen Matris)
mxn lik karesel olmayan matristir.
f(x) bir fonksiyon ve
Gradiyent vektörün birinci dereceden kısmi türevini alalım;

Buradan jakobiyen matris şu şekilde tanımlanır:

Verilen bir noktada vektör değeri teğet düzleme yönelimlidir.
Skaler değerli fonksiyonların gradyentini genelleştirir.
Çoğunlukla birinci dereceden hata yayılımında kullanılır.

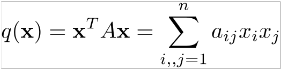
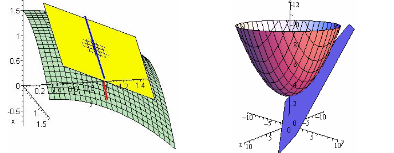
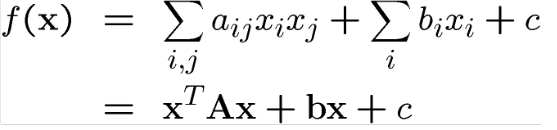
Quadratic Forms
Birçok fonksiyon kuadratik form kullanılarak yerel yakınlaştırılabilir;
Genellikle tek bir kuadratik formun maksimum yada minimumu bulunur.
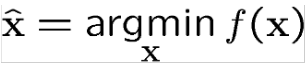
Bu minimizasyon problemine bir çözüm üretmek için matris özelliklerini nasıl kullanabiliriz?
f(x)=0
Matris çarpımının tanımını kullanarak, f ‘;
f(x) in minimum değeri türevinin 0 olduğu yerdir;

Böylece sistemi çözebiliriz;

Matris simetrik ise sistem bu hale gelir;
