Sensörler
ROBOTİKTE KULLANILAN SENSÖRLER
1-)Isı Sensörleri
Robotlar fiziksel, kimyasal, elektronik, mekanik ve biyolojik sistemler olabilirler. Bu sistemlerin hepsi sıcaklıktan etkilenebilirler.
Sıcaklıktan etkilenen sistemler hata üretmeye başlarlar. Bunların kontrolünü ise ısı sensörleri sağlamaktadır. En çok kullanılan sıcaklık
sensörleri ise;
Dirençsel sıcaklık sensörleri (RTD-Resistance Temperature Detector)
Termistörler
Isıl çiftler (thermocouple , termokupl)
Entegre devre sıcaklık sensörleri
2-)Dokunma (Touch) Sensörleri
Robot çalışmalarının vazgeçilmezi denilebilecek sıklıkta kullanılan sensördür.Robotun bir başka nesneye temas edip etmediğinin kontrolünü
dokunma sensörleri sayesinde algılayabiliriz. Lojik 0 ve 1 ile çalışır. Temas olduğu zaman gerekli devreyi açar ve lojik 1 değerini
döndürür. Daha sonra robot bu değere göre işlem yapar.

3-)Basınç Sensörleri
Genellikle robot kol tasarımlarında kullanılan sensörlerdir. Touch sensör gibi temas durumunda aktif hala gelen sensörlerdir.
Temastan sonra oluşan basıncın fiziksel değerini elektriksel sinyallere çevirmekle görevlidirler. Soft Robotikte basınç sensörleri anahtar
kelimedir.

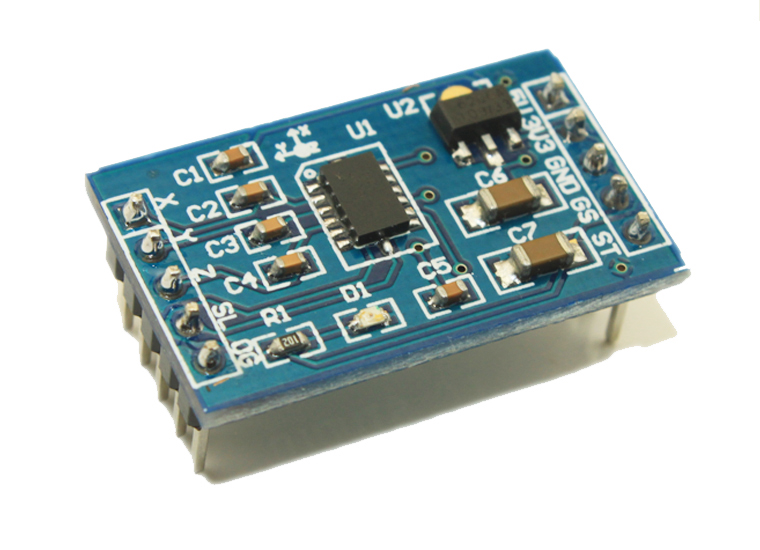
4-)Denge ve Eğim Sensörleri
İnsanlar için hareketteki en önemli kısım dengedir. Robot projelerinde de bu hassasiyette robot geliştirilmek istenebilir. Bu durumda
denge sensörleri işin içine girmektedir. Çalışma mantığı kısmen touch sensörler gibidir. Civa ve ya metal bazda bir parçacığın doğu
veya batı konumlarındaki anahtarı açmasıyla işlevini yerine getirir.
5-)Reflective Optosensors
Yansımalı sensörlerdir. Yayılan IR sinyalin hedefe çarptıktan sonra geri yansıyıp algılanma mantığıyla çalışmaktadır. Çarptığı nesnenin
fiziksel özellikleri geri yansıma miktarını değiştirmektedir. Güncel olarak kullanılan mesafe ölçme sensörleriyle hemen hemen aynı
mantıkta çalışmaktadır. CNY70 Kontrast sensör piyasadaki yansımalı sensörlere örnek olarak verilebilir.

6-)Encoderlar
Robotlar ve ya geliştirilen otonom sistemler referans noktasının etrafında dönme işlemi yapabilmektedirler. Bu dönme hareketi
yapılırken oluşan açısal hız ve dönme hareketi sonundaki açısal pozisyonu belirlerken encoderler kullanılır. IR ledin yaydığı ışık
sayesinde bu verilere ulaşılır.

7-)Mesafe Sensörleri
Robot hareketindeki en önemli kısımlardan biri robotun etrafındaki nesneleri görmesidir. Nesneleri göremeyen robot dış dünyasından
bağımsız bir şekilde bir hareket eder ve gerçekçi sonuçlar alamayız. Çevre algılaması için kullanılan sensörlere mesafe algılama
sensörleri denilmektedir. Engel algılama sensörlerinin mesafe algılama sensörlerinden mantıksal olarak bir farkı yoktur. Çalışma mantığı
yansımalı sensörlerle aynıdır. Sinyalin kaynaktan çıkıp dönme süresi arasındaki farka göre mesafe tahmini yapılmaktadır. Sensörün
markası ve modeline göre farklı sinyal tipleri kullanılabilmektedir.
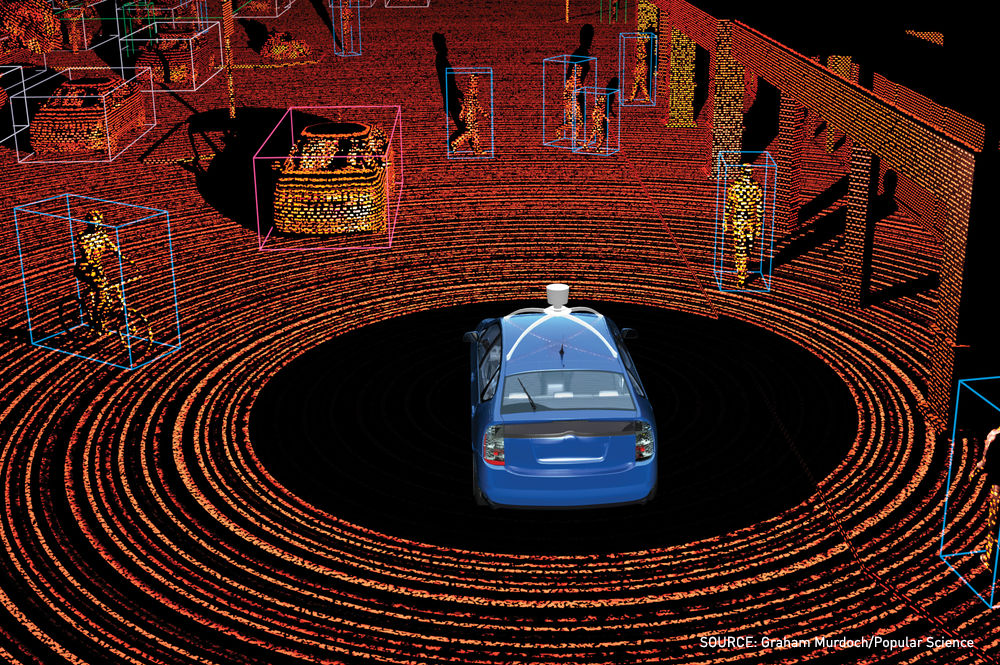
7.1-)LIDAR
Lidar mesafe algılama için üretilmiş 3D lazer tarama tekniğiyle çalışan bir sistemdir.Başlarda havadan deniz altıların tespiti için
geliştirilmiştir. Daha sonra arkeolojiden savunma sanayine kadar her alana girmiştir. Havadan tarama yapan lidar sistemlerinde Lidar
sensörü, IMU ve dahili bilgisayarlardan oluşurken karadan tarama yapan lidar sistemlerinde IMU bulunmaz. Periyodik olarak yayılan lazer
ışınlarının kaynaktan çıkma ve dönme zamanları arasındaki fark mesafeyi belirlemektedir. Hareketli nesnelerin sinyali yolladığındaki
tam yerini belirlemek için GPS kullanılan sistemlerde mevcuttur. Uygulama menzillerinin uzunluğu lidarı farklı kılan diğer önemli
özelliklerinden biridir. Pahalı bir sistemdir ancak verim alınması bakımından oldukça gelişmiştir.

Lazer tarayıcı, farklı platformlara monte edilebilir (uzay-hava-yersel-mobil) ve amaca uygun bir ölçme planıyla taranan obje veya
yer yüzeyinin modeli 3 boyutlu olarak oluşturulabilir. Günümüzde hava LiDAR ile taranan yeryüzünün topografik modeli, Sayısal Yüzey
Modeli (SYM), Sayısal Arazi Modeli (SAM), yükseklik modeli, hızlı ve yüksek doğruluklarla (ormanlık alanlarda dahi) üretilebilmektedir.
Yeryüzü veya ilgili objenin yüzeyi hakkında veri elde etmek için kullanılan aktif uzaktan algılama teknolojisi olan LiDAR tekniğinde
yakın kızılötesi (near infrared) ışınım kullanılır. LiDAR ile üretilen modeller, çalışma alanına göre sayısı değişmekle birlikte
milyonlar-milyarlarla ifade edilebilen “Nokta Bulutu” nu içerir. Bu yoğun nokta bulutu, her bir nokta için 3 boyutlu (X-Y-Z) nokta
verisi içerir ve ilgili yeryüzü parçasına göre yoğunluğu değişmekle beraber milyarlarca noktalık “Nokta Bulutu” verisi toplanır.
Genel olarak bir LiDAR sistemi şunları içerir:
Konum ve Yönlendirme Sistemi (Positioning and Orientation System-POS).
Küresel Konum Belirleme Sistemleri (Global Navigation Satellite System-GNSS),
İnersiyal Ölçme Birimi (Inertial Measurement Unit-IMU) ile izdüşüm merkezinin koordinatları ve üç dönüklük parametresi belirlenerek
ilgili platformun yönlendirmesi gerçekleştirilir.
Lazer Tarayıcı.
Lazer tarayıcı ve diğer ekipmanların yerleştirildiği Platform.
Kontrol/yönetim/veri depolama birimi.
Genel olarak LiDAR Kullanım alanları şunlardır:
1-Temel Harita Üretimi: LiDAR SAM(Sayısal Arazi Modeli): Ortorektifikasyon, Kritik Arazi Arızaları ile destekli olarak eşyükseklik
eğrisi üretimi.
2-Sel Baskınlarının Haritalanması: Sel Baskını Zara Analizleri, Hidrolojik ve Hidrolik Modelleme.
3-Doğal Kaynak Yönetimi: Ağaç Yükseklikleri, Kereste Hacmi, Maden Sahalarında Hacim Hesaplamalarında etkin olarak kullanılır.
4-Ulaşım ve/veya Altyapı Güzergahlarının Haritalanması: Yeni ulaşım ve altyapı projelerinin tasarım ve uygulamalarında kullanılır.
5-Şehir Modelleme: Hazırlanacak 3-B yeryüzü ve yansıtıcı yüzey modelleri Kentsel Planlama, Görüş Analizleri, vb. Amaçlar ile kullanılır.
6-Enerji Nakil Hatları: Tasarım, yeniden inşa ve termal izleme analizleri için kullanılır. PLS – CADD gibi yazılımlar ile uyumludur.
7-Demiryolları: Mühendislik tasarımları, Tren Kontrolları için izleme verilerinin elde edilmesinde kullanılır.
8-Karayolları: Karayolu tasarımında doğru veri temin etmekte kullanılır.
9-Sulama: Özellikle yüksek yükseklik doğruluğu gerektiren sulama projelerinde topografik harita üretimi.
7.2-)Kızılötesi Sensör
Robotikte kullanılan kızıl ötesi sensörler engel tespiti ve mesafe algılama için kullanılabilinmektedirler. Üzerinde bulunan 2 gözden
birincisi kızıl ötesi ışın yaymakta diğer göz ise dönen kızıl ötesi ışınları belli bir açı değeriyle almaktadır.Her ışının geri yansıması
farklı bir noktaya düşmektedir ve bu mesafe için bize bilgi vermektedir. Robotik piyasasında maliyeti fazla lazer sistemleri kullanmak
istemeyen geliştiriciler daha az maliyetli kızıl ötesi sensörlerle çalışmak isteyebilirler. Aynı verim alınmasa bile maliyet bakımından
çok doğru bir seçim olabilirler.

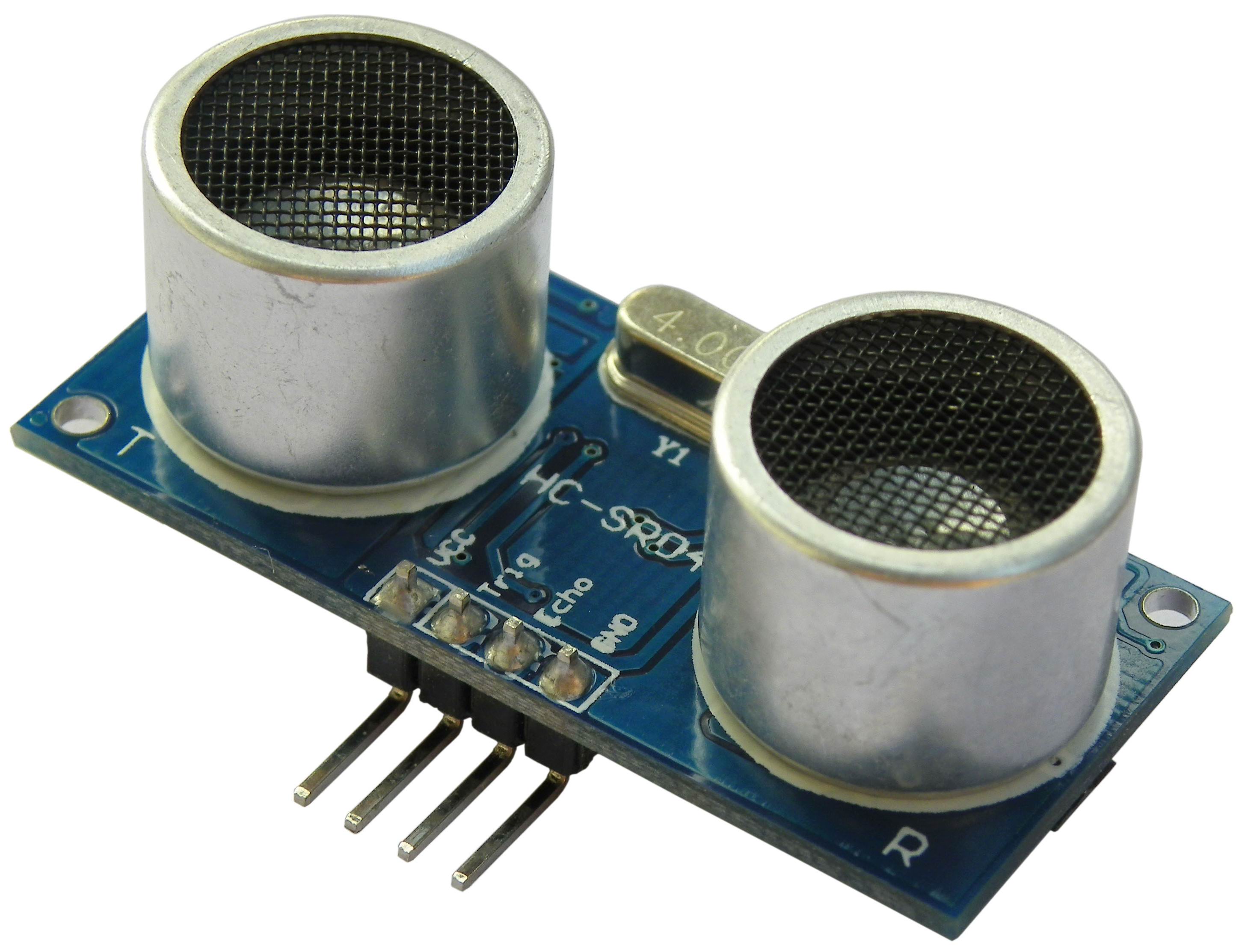
7.3-)Ultrasonik Sensörler(SONAR)
Ultrasonik sensörlerin çalışma mantığıda hemen hemen lidar ve kızılötesi sensörler ile aynıdır. Ultrasonik sensörler ise ses dalgaları
ile mesafe ölçümü yapmaktadırlar. Sensör 20 kHz ile 500 kHz frekans aralığında dalgalar üretir ve nesneye çarpıp geri dönme sinyaline
göre mesafe ölçümü yapmaktadır. Basit bir matematikle anlatmak gerekirse sinyalin kaynaktan çıkıp kaynağa geri dönme zamanı arasındaki
fark ikiye bölündükten sonra ses hızıyla çarpılarak mesafe ölçme işlemi yapılır. Uygulama menzilleri 30 metreye ulaşabilir. Uygulama
menzillerinin fazlalığı sebebiyle bu sensörler deniz altı ortamlarda sıklıkla kullanılınmaktadırlar.
8-)Microsoft Kinect
Kinect, Microsoft firmasının piyasaya 2010 yılında çıkardığı projedir. Proje X-BOX ürününe her hangi bir kontrolör olmadan müdahale
edebilme problemiyle yaratılmıştır. Ancak daha sonra Kinect sensörü alanının dışında kullanılmaya başlanılmıştır. Sensörün teknik
özelliklerine gelinecek olunursa Kinect sensör üzerinde renk ve derinlik algılama lensleri, ses mikrofon düzeni, sensör ayarlaması
için tilt motoru bulundurur. Yaydığı kızıl ötesi ışınlar sayesinde hareket algılama işlemi yapmaktadır. X-BOX için ise bu kızıl ötesi
ışınlardan gelen verileri CMOS algılayıları sayesinde komuta çevirmektedir ve bu komutlar oyunda el hareketlerini algılamaktadır.
Robotik piyasada ise Kinect mesafe ölçümü, robotun SLAM organizasyonu gibi birçok alanda kullanılmaktadır. Derinlik algısına rahat bir
şekilde ulaşılması diğer sensörlerden farkını ortaya koymaktadır. MATLAB ortamında Kinect’in görüntülerine ulaşılması tek satırda
sonlanabilmektedir. Microsoft firmasının ürünü olduğu için “Kinect for Windows” anahtar kelimesi Kinect ile uğraşan herkesin karşısına
çıkmaktadır.

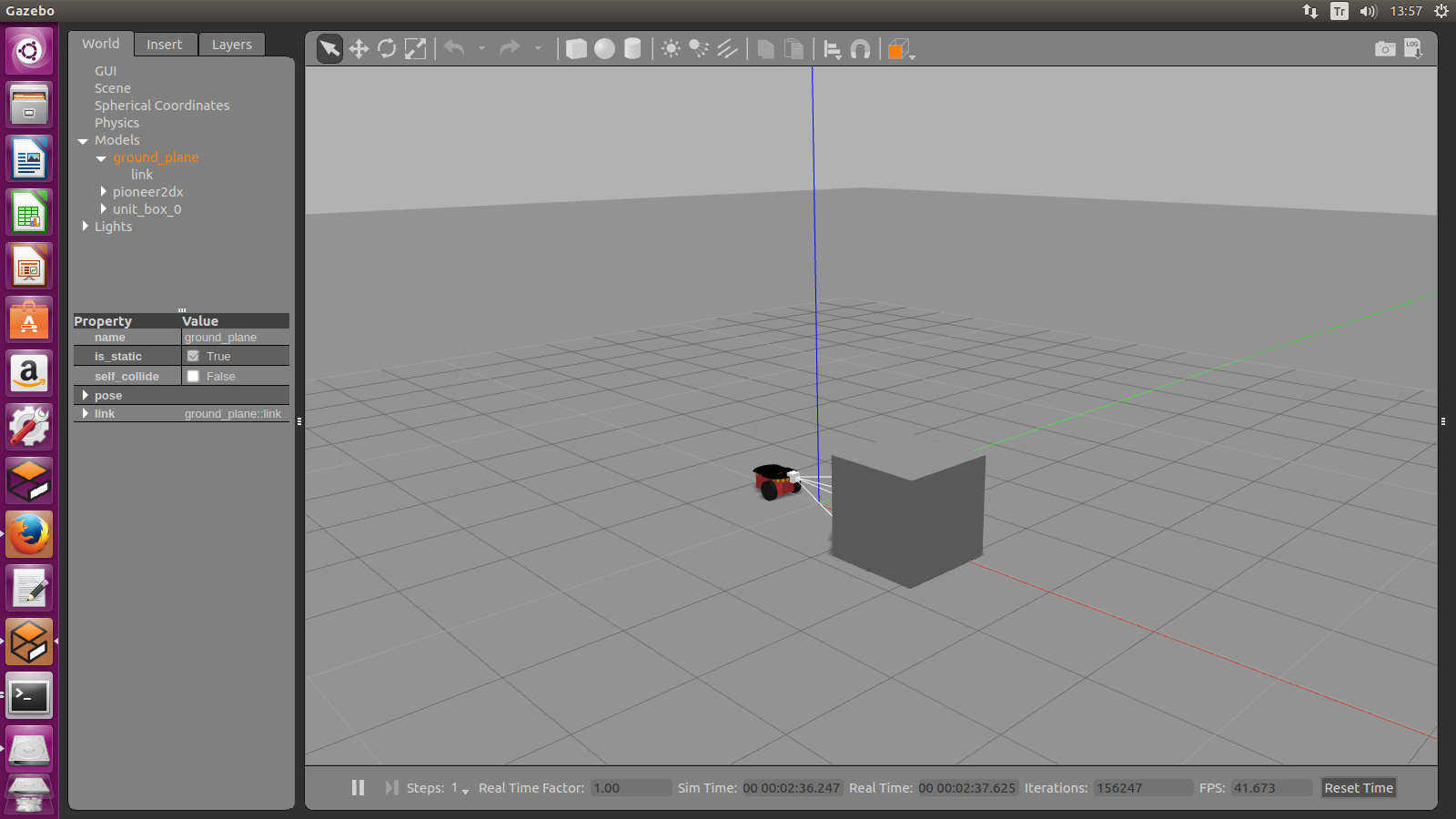
GazeboSim Ortamında sensör verileri
Kamera eklenmiş pioneer2dx görüşü
Kamera eklenmiş pioneer2dx görüşü
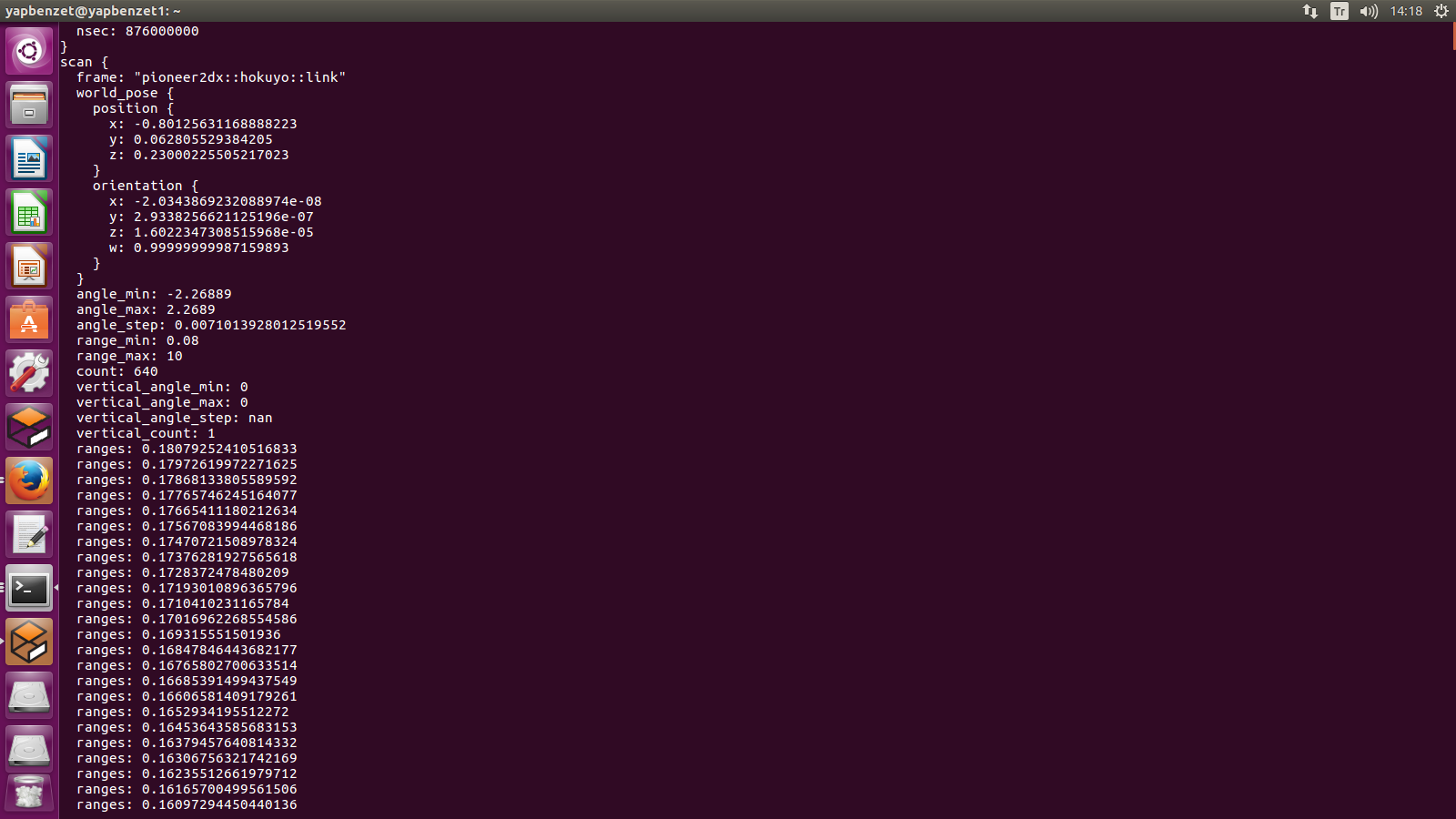
Hokuyo lazer sensör eklenmiş pioneer2dx görüşü
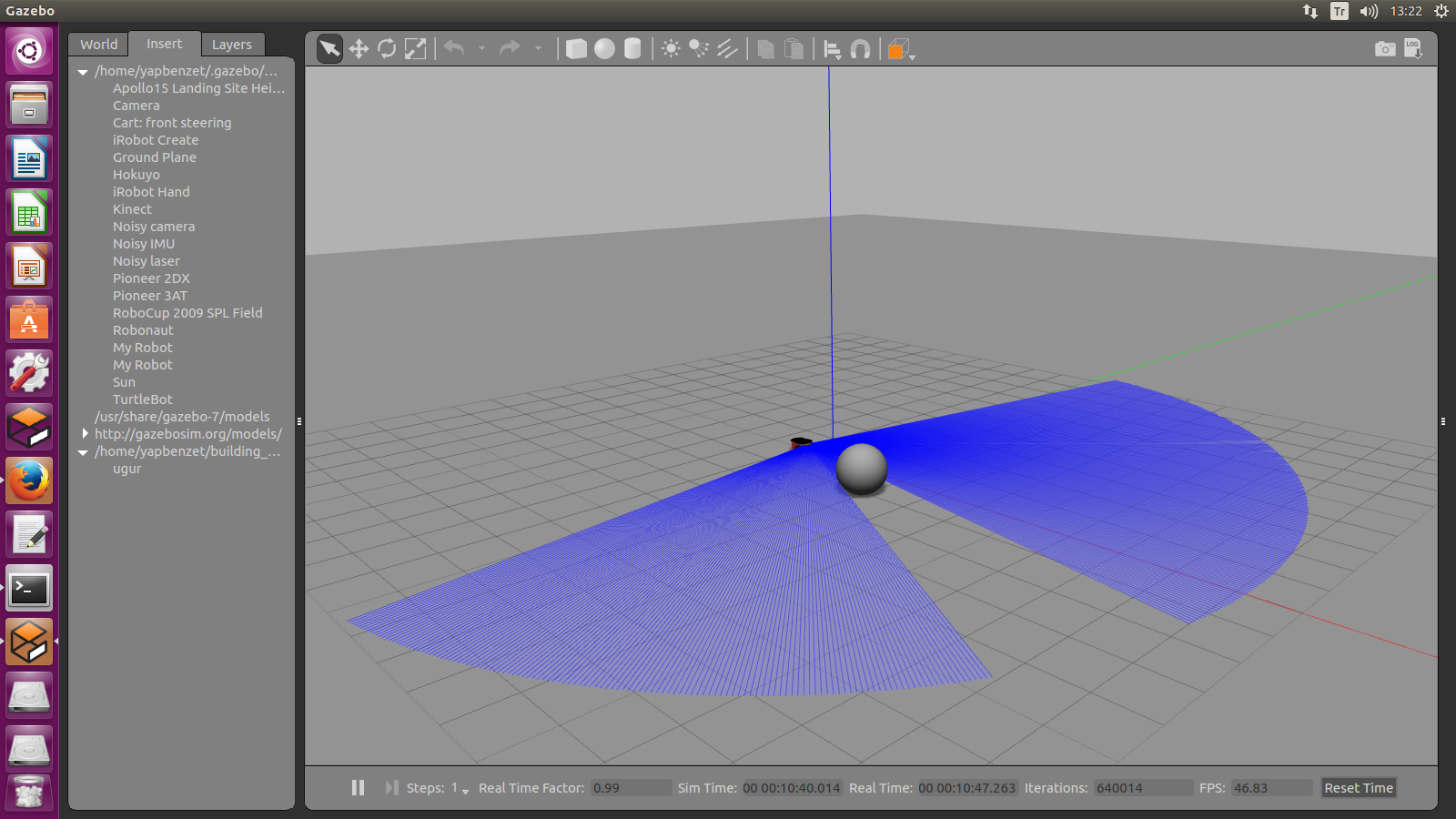
Hokuyo lazer sensör eklenmiş pioneer2dx görüşü
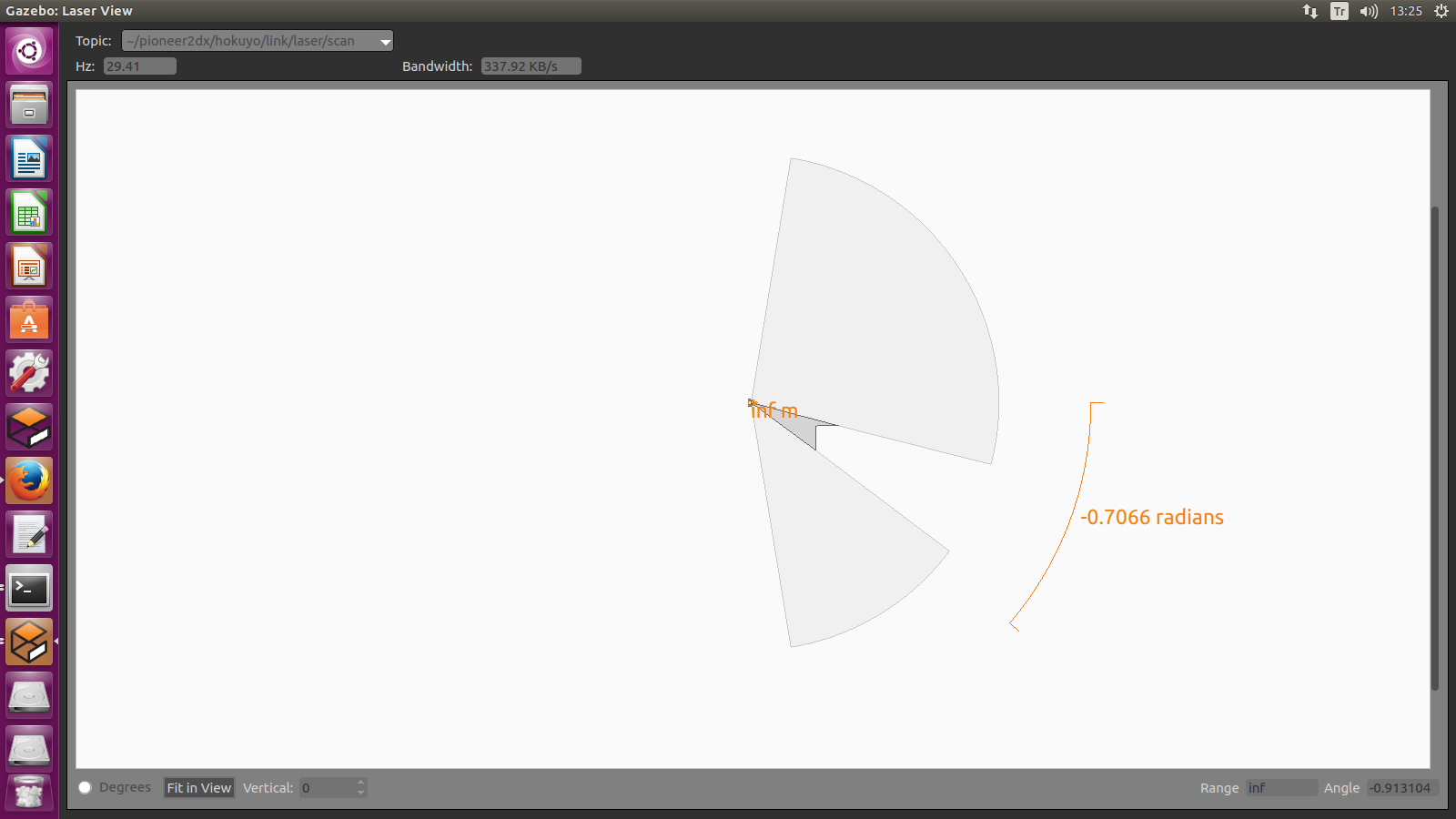
Hokuyo lazer sensör eklenmiş pioneer2dx verileri