Robot Kolu Yörünge Çıkarma
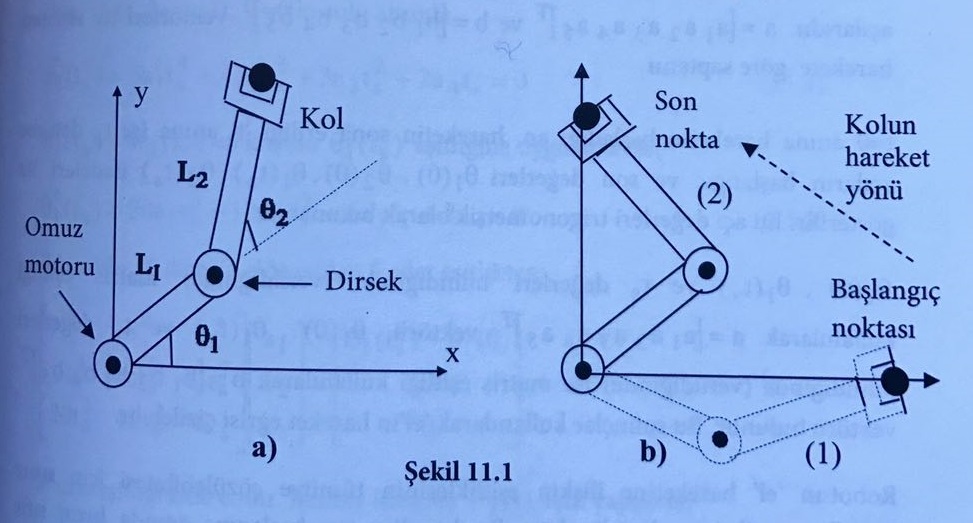
Şekil 11.1 de bir robot kol mekanizması gösterilmiştir.Tüm sistem iki adet motordan oluşmaktadır. İlki “omuz motoru” diğeri ise “dirsek motoru” olarak adlandırılmıştır. Bu hareket probleminde ana sorun elin bir noktadan diğerine olan hareketini sağlamak için eklem motorlarının konum açılarının nasıl kontrol edileceğidir. Şekil 11.1 de görüldüğü üzere kol (1) numaralı konumdan (2) nolu konuma gelecektir. Verilen açılar polinom olarak tanımlanıp 3 adet denklem ve 3 bilinmeyen elde edilerek matris yardımıyla MATLAB ortamında çözülerek robot kolunun rota grafiği çıkarılır. Bunlar için bir sayısal örnek tanımlanırsa; ts=2saniye, omuz motor açısı -19, ts anında 43 derece ve dirsek motoru açısı 44, ts anında 151 derece olsun. L1=4ft , L2=3ft iken robot kolu (6.5,0) koordinatından (0,2) koordinatına göre hareket ettiğine göre omuz ve dirsek polinomlarının a ve b katsayılarını MATLAB ile bularak robot elinin hareket rotasını çizdirelim.
ts=2;
teta10=-19*pi/180;
teta1ts=43*pi/180;
teta20=44*pi/180;
teta2ts=151*pi/180;
%a katsayıları için eşitlikler
T=[ts^5 ts^4 ts^3
5*ts^4 4*ts^3 3*ts^2
20*ts^3 12*ts^2 6*ts];
c=[teta1ts-teta10;0;0];
disp('teta1 hareketi icin katsayılar:')
a=T\c
%'b' katsayıları icin katsayılar
d=[teta2ts-teta20;0;0];
disp('teta2 hareketi icin katsayilar')
b=T\d
%hareket eşitlikleri
L1=4;L2=3;
t=linspace(0,2,401);
tq=[t.^5;t.^4;t.^3];
teta1=teta10+a'*tq;
teta2=teta20+b'*tq;
x=L1*cos(teta1)+L2*cos(teta1+teta2);
y=L1*sin(teta1)+L2*sin(teta1+teta2);
%robot el hareketinin cizimi
plot(x,y);xlabel('x');ylabel('y');title('robot kolunun rotasi');
text(4.3,0,'t=0s:(x,y)=(6.5,0)');
text(0.2,2,'t=2s:(x,y)=(0,2)')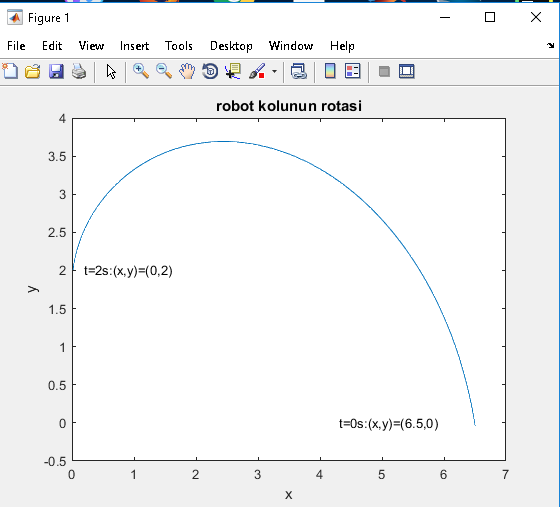
Burada matlab dışında bir dil kullanılabilir mi? Pyhton veya C# gibi.